TUM Robot Competition 2013:
Lead Engineer: microprocessor programming, circuit design, mechanical engineering
Ball Throwing Robot Project
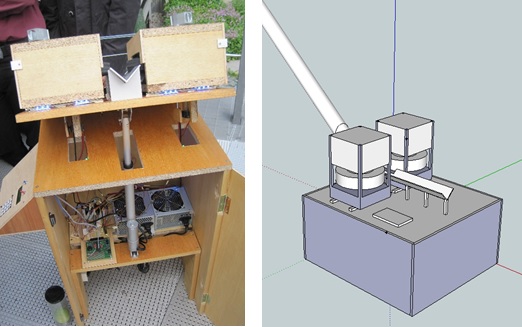 The finished prototype and the initial 3D model of the robot
The finished prototype and the initial 3D model of the robotThe duration of this development project was two semesters during my undergrad at the Technical University Munich. The task was to develop and build a concept for a robot, which should be able to throw different kind of balls to a variable distance. The user would be able to select either a Tennis- or Squashball and set a variable distance between two and five meters and the robot should independently throw the ball into a target basket at the given distance.
The project team consisted of six members and we developed a concept leveraging the kinetic energy of two heavy rubber tires, which would first be accelerated to the needed speed and then adjusted to the right angle to achieve the throwing distance. During the project I was the lead engineer and responsible for the success of the project from a technical side. I was involved in the design of the electrical cuircits, programming of the embedded microprocessors and production of the mechanical parts.
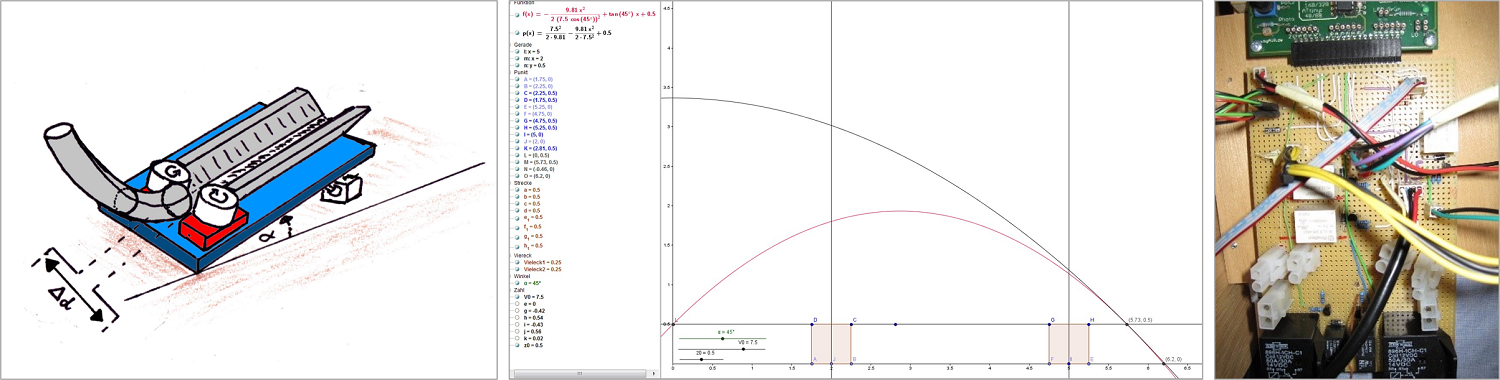 One of the first sketches of the project, the throwing distance simulations and parts of the electric circuit
One of the first sketches of the project, the throwing distance simulations and parts of the electric circuit
Some of my research projects:
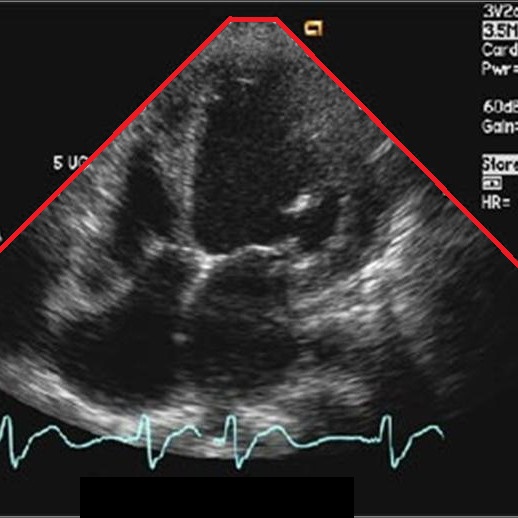
During my time as a resarcher at the Biorobotics Lab of the Harvard University in Massachusetts, I use machine learning to develop an segmentation and classification of heart diseases based on ultrasonic images.
Learn More
I was a resarcher at the Robotics Lab of the Stanford University in California, working in the field of underwater Robotics. I developed an underwater hand gesture recognition for diver-robot interaction.
Learn More
During my studies at the CDTM I was working on a technology consulting project to develp a prototype of 3D-enabled glasses and an haptic feedback wristband for enhanced navigation of blind people.
Learn More